2026
ComSim: Building Scalable Real-World Robot Data Generation via Compositional Simulation
Yiran Qin*, Jiahua Ma*, Li Kang*, Wenzhan Li*, Yihang Jiao, Xin Wen, Xiufeng Song, Heng Zhou, Jiwen Yu, Zhenfei Yin, Xihui Liu, Philip Torr, Yilun Du, Ruimao Zhang# (* equal contribution, # corresponding author)
Under review.
TL;DR: ComSim leverages a simulator together with a video generation model to build scalable real-world robot manipulation data, achieving consistency in both action and appearance.
ComSim: Building Scalable Real-World Robot Data Generation via Compositional Simulation
Yiran Qin*, Jiahua Ma*, Li Kang*, Wenzhan Li*, Yihang Jiao, Xin Wen, Xiufeng Song, Heng Zhou, Jiwen Yu, Zhenfei Yin, Xihui Liu, Philip Torr, Yilun Du, Ruimao Zhang# (* equal contribution, # corresponding author)
Under review.
TL;DR: ComSim leverages a simulator together with a video generation model to build scalable real-world robot manipulation data, achieving consistency in both action and appearance.
CoEnv: Driving Embodied Multi-Agent Collaboration via Compositional Environment
Li Kang*, Yutao Fan*, Rui Li*, Heng Zhou*, Yiran Qin, Zhemeng Zhang, Songtao Huang, Xiufeng Song, Zaibin Zhang, Bruno N.Y. Chen, Zhenfei Yin, Dongzhan Zhou#, Wangmeng Zuo#, Lei Bai# (* equal contribution, # corresponding author)
Under review.
TL;DR: CoEnv composes real and simulated workspaces to safely plan, validate, and transfer multi-agent manipulation strategies to real robots.
CoEnv: Driving Embodied Multi-Agent Collaboration via Compositional Environment
Li Kang*, Yutao Fan*, Rui Li*, Heng Zhou*, Yiran Qin, Zhemeng Zhang, Songtao Huang, Xiufeng Song, Zaibin Zhang, Bruno N.Y. Chen, Zhenfei Yin, Dongzhan Zhou#, Wangmeng Zuo#, Lei Bai# (* equal contribution, # corresponding author)
Under review.
TL;DR: CoEnv composes real and simulated workspaces to safely plan, validate, and transfer multi-agent manipulation strategies to real robots.
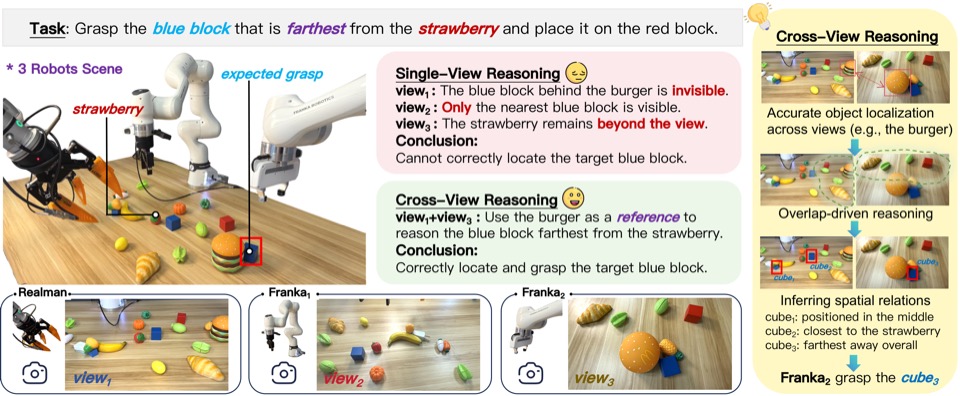
Ego to World: Collaborative Spatial Reasoning in Embodied Systems via Reinforcement Learning
Heng Zhou*, Li Kang*, Yiran Qin†, Xiufeng Song, Ao Yu, Zilu Zhang, Haoming Song, Kaixin Xu, Yuchen Fan, Dongzhan Zhou, Xiaohong Liu, Ruimao Zhang, Philip Torr, Lei Bai#, Zhenfei Yin# (* equal contribution, † project leader, # corresponding author)
Under review.
TL;DR: We introduce E2W-Bench and CoRL to learn world-centric reasoning from distributed ego views, with transfer to real-world multi-robot manipulation.
Ego to World: Collaborative Spatial Reasoning in Embodied Systems via Reinforcement Learning
Heng Zhou*, Li Kang*, Yiran Qin†, Xiufeng Song, Ao Yu, Zilu Zhang, Haoming Song, Kaixin Xu, Yuchen Fan, Dongzhan Zhou, Xiaohong Liu, Ruimao Zhang, Philip Torr, Lei Bai#, Zhenfei Yin# (* equal contribution, † project leader, # corresponding author)
Under review.
TL;DR: We introduce E2W-Bench and CoRL to learn world-centric reasoning from distributed ego views, with transfer to real-world multi-robot manipulation.
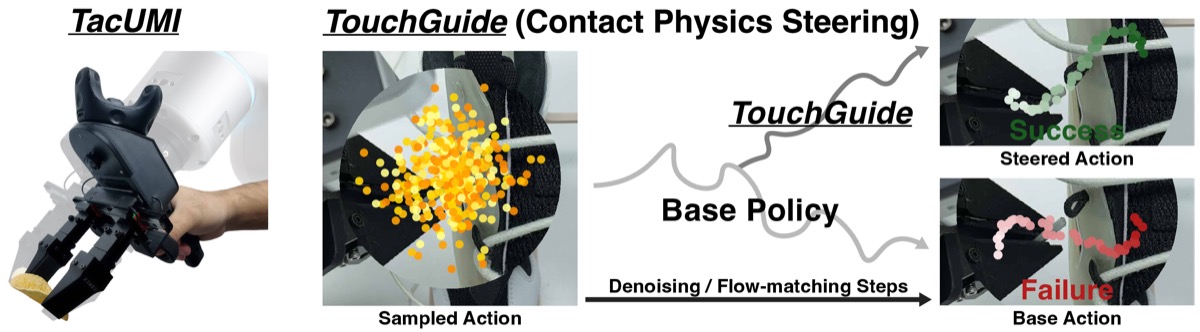
TouchGuide: Inference-Time Steering of Visuomotor Policies via Touch Guidance
Zhemeng Zhang*, Jiahua Ma*, Xincheng Yang*, Xin Wen, Yuzhi Zhang, Boyan Li, Yiran Qin†, Jin Liu, Can Zhao, Li Kang, Haoqin Hong, Zhenfei Yin, Philip Torr, Hao Su, Ruimao Zhang, Daolin Ma# (* equal contribution, † project leader, # corresponding author)
RSS 2026
TL;DR: Inference-time tactile guidance steers visuomotor policies toward physically feasible contact-rich actions, with strong gains on tasks like shoe lacing and chip handover.
TouchGuide: Inference-Time Steering of Visuomotor Policies via Touch Guidance
Zhemeng Zhang*, Jiahua Ma*, Xincheng Yang*, Xin Wen, Yuzhi Zhang, Boyan Li, Yiran Qin†, Jin Liu, Can Zhao, Li Kang, Haoqin Hong, Zhenfei Yin, Philip Torr, Hao Su, Ruimao Zhang, Daolin Ma# (* equal contribution, † project leader, # corresponding author)
RSS 2026
TL;DR: Inference-time tactile guidance steers visuomotor policies toward physically feasible contact-rich actions, with strong gains on tasks like shoe lacing and chip handover.
Advances and Innovations in the Multi-Agent Robotic System (MARS) Challenge
Li Kang*, Heng Zhou*, Xiufeng Song*, Rui Li*, Bruno N.Y. Chen, Ziye Wang, Ximeng Meng, Stone Tao, Yiran Qin, Xiaohong Liu, Ruimao Zhang, Lei Bai, Yilun Du, Hao Su, Philip Torr, Zhenfei Yin#, Challenge Participants (* equal contribution, # corresponding author)
MARS Challenge Technical Report @ NeurIPS 2025 Workshop on Space in Vision, Language, and Embodied AI
TL;DR: We present the technical report of the MARS Challenge, which systematically summarizes the outstanding solutions from participants and provides key insights into the challenges of multi-agent embodied collaboration.
[Project Page] [Paper] [Code (Planning Track)] [Code (Control Track)]
Advances and Innovations in the Multi-Agent Robotic System (MARS) Challenge
Li Kang*, Heng Zhou*, Xiufeng Song*, Rui Li*, Bruno N.Y. Chen, Ziye Wang, Ximeng Meng, Stone Tao, Yiran Qin, Xiaohong Liu, Ruimao Zhang, Lei Bai, Yilun Du, Hao Su, Philip Torr, Zhenfei Yin#, Challenge Participants (* equal contribution, # corresponding author)
MARS Challenge Technical Report @ NeurIPS 2025 Workshop on Space in Vision, Language, and Embodied AI
TL;DR: We present the technical report of the MARS Challenge, which systematically summarizes the outstanding solutions from participants and provides key insights into the challenges of multi-agent embodied collaboration.
[Project Page] [Paper] [Code (Planning Track)] [Code (Control Track)]
2025
Reinventing Multi-Agent Collaboration through Gaussian-Image Synergy in Diffusion Policies
Ziye Wang*, Li Kang*, Yiran Qin*, Jiahua Ma, Zhanglin Peng, Lei Bai, Ruimao Zhang# (* equal contribution, # corresponding author)
NeurIPS 2025
TL;DR: 3D Gaussians make multi-agent teamwork click!
Reinventing Multi-Agent Collaboration through Gaussian-Image Synergy in Diffusion Policies
Ziye Wang*, Li Kang*, Yiran Qin*, Jiahua Ma, Zhanglin Peng, Lei Bai, Ruimao Zhang# (* equal contribution, # corresponding author)
NeurIPS 2025
TL;DR: 3D Gaussians make multi-agent teamwork click!
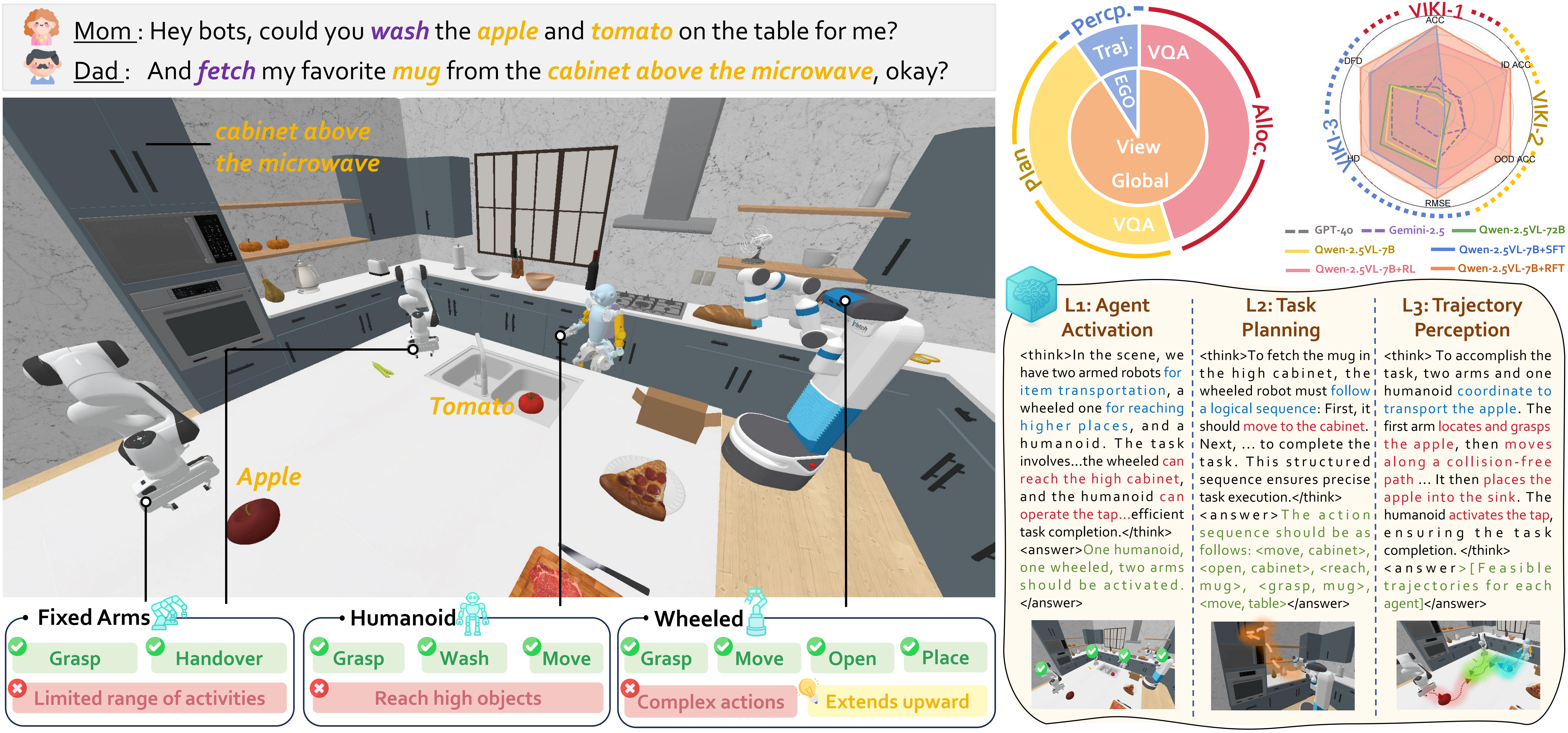
VIKI‑R: Coordinating Embodied Multi-Agent Cooperation via Reinforcement Learning
Li Kang*, Xiufeng Song*, Heng Zhou*, Yiran Qin#, Jie Yang, Xiaohong Liu, Philip Torr, Lei Bai#, Zhenfei Yin# (* equal contribution, # corresponding author)
NeurIPS 2025
TL;DR: Boost VLM’s visual reasoning with GRPO to orchestrate collaboration among heterogeneous embodied robots.
VIKI‑R: Coordinating Embodied Multi-Agent Cooperation via Reinforcement Learning
Li Kang*, Xiufeng Song*, Heng Zhou*, Yiran Qin#, Jie Yang, Xiaohong Liu, Philip Torr, Lei Bai#, Zhenfei Yin# (* equal contribution, # corresponding author)
NeurIPS 2025
TL;DR: Boost VLM’s visual reasoning with GRPO to orchestrate collaboration among heterogeneous embodied robots.
RoboFactory: Exploring Embodied Agent Collaboration with Compositional Constraints
Yiran Qin*, Li Kang*, Xiufeng Song*, Zhenfei Yin#, Xiaohong Liu, Xihui Liu, Ruimao Zhang#, Lei Bai# (* equal contribution, # corresponding author)
ICCV 2025 & Outstanding Paper Award at CVPR 2025 MEIS Workshop
TL;DR: Using compositional constraints to coordinate multiple robotic arms for complex—and surprisingly fun—manipulation tasks!
RoboFactory: Exploring Embodied Agent Collaboration with Compositional Constraints
Yiran Qin*, Li Kang*, Xiufeng Song*, Zhenfei Yin#, Xiaohong Liu, Xihui Liu, Ruimao Zhang#, Lei Bai# (* equal contribution, # corresponding author)
ICCV 2025 & Outstanding Paper Award at CVPR 2025 MEIS Workshop
TL;DR: Using compositional constraints to coordinate multiple robotic arms for complex—and surprisingly fun—manipulation tasks!
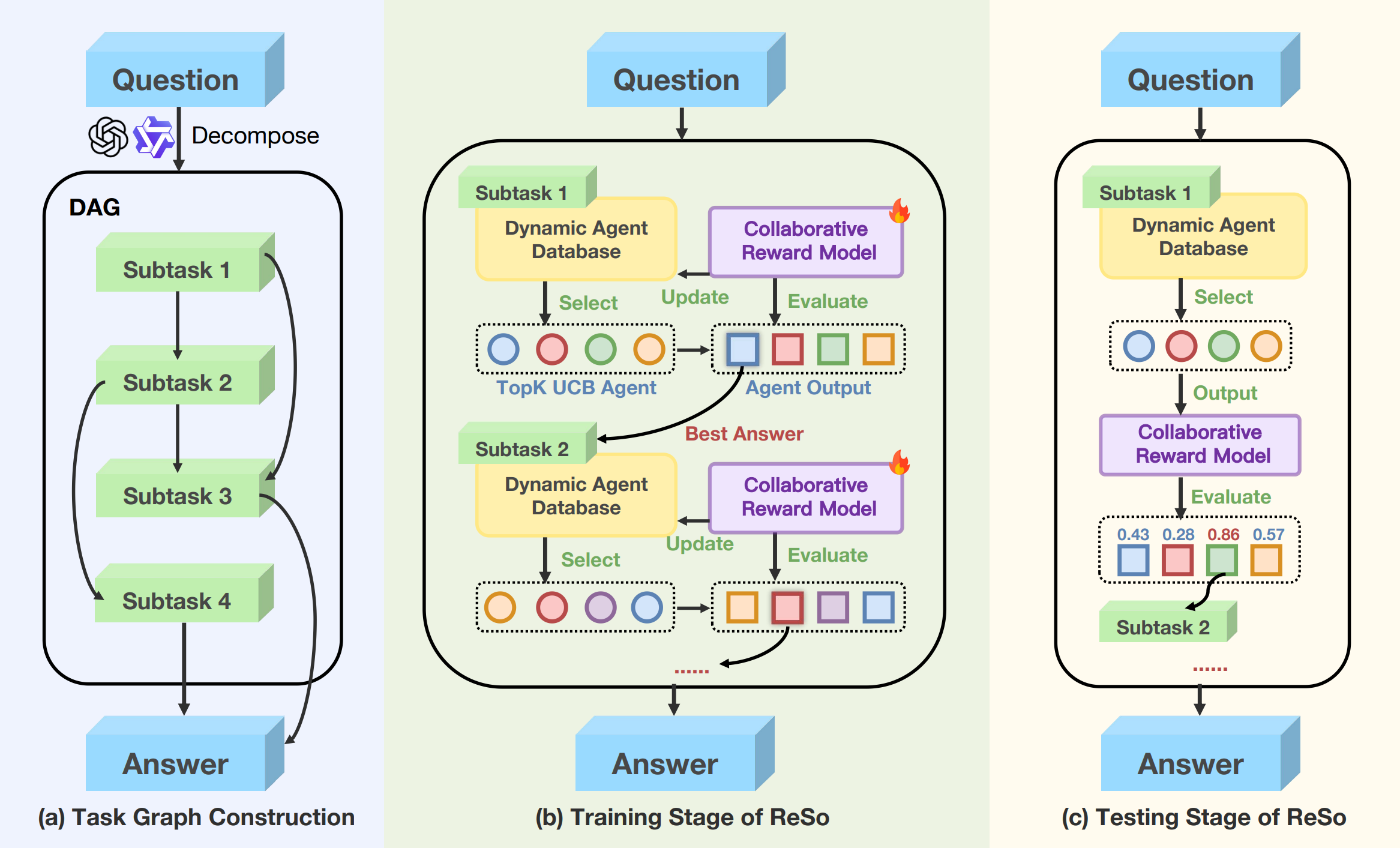
ReSo: A Reward-driven Self-organizing LLM-based Multi-Agent System for Reasoning Tasks
Heng Zhou*, Hejia Geng*, Xiangyuan Xue, Li Kang, Yiran Qin, Zhiyong Wang, Zhenfei Yin#, Lei Bai# (* equal contribution, # corresponding author)
EMNLP 2025 Main SAC Highlights Award
TL;DR: A reward-driven multi-agent system that self-organizes to enable efficient collaboration through dynamic optimization and agent selection.
ReSo: A Reward-driven Self-organizing LLM-based Multi-Agent System for Reasoning Tasks
Heng Zhou*, Hejia Geng*, Xiangyuan Xue, Li Kang, Yiran Qin, Zhiyong Wang, Zhenfei Yin#, Lei Bai# (* equal contribution, # corresponding author)
EMNLP 2025 Main SAC Highlights Award
TL;DR: A reward-driven multi-agent system that self-organizes to enable efficient collaboration through dynamic optimization and agent selection.
2024
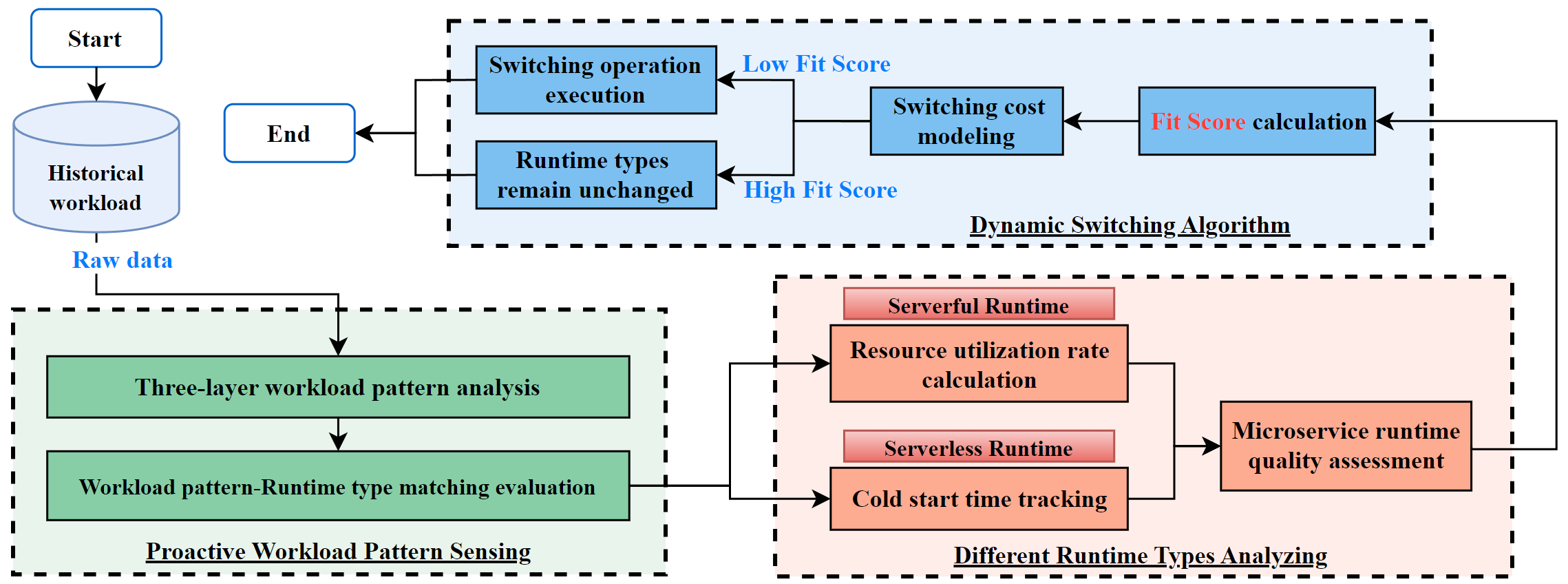
Adaptive Selecting Algorithm For Runtime Types of Microservices
Li Kang*, Binbin Feng*, Zhijun Ding# (* equal contribution, # corresponding author)
ICWS 2024
TL;DR: Adaptively select optimal runtimes (serverless/serverful) for microservices to enhance performance and cost efficiency.
Adaptive Selecting Algorithm For Runtime Types of Microservices
Li Kang*, Binbin Feng*, Zhijun Ding# (* equal contribution, # corresponding author)
ICWS 2024
TL;DR: Adaptively select optimal runtimes (serverless/serverful) for microservices to enhance performance and cost efficiency.